As the advanced robot gripper sub-system group in UBC Open Robotics Team, our goal is to develop a versatile robot manipulator for a housekeeper robot which performs tasks in everyday environments. The gripper needs to grasp objects of different shape and size and manipulate them. Simple grippers in the market are not appropriate for our application because they are not capable of adapting to the shape of different objects (unless special adapter is prepared for each specific scenario). As a result, the holding forces are limited by the object strength, and they generally rely on friction forces to lift the object. Therefore, we took inspiration from the MARS robotic hand developed in Laval University, and designed the parametric CAD model of an under-actuated robot gripper, which is characterized by having fewer actuators than degrees of freedom. When applied to mechanical fingers, the concept of under-actuation leads to self-adaptability, which is to envelope the grasped object automatically without complex control strategies. This is achieved by strategically introducing elastic elements (e.g. springs) and mechanical limits in the gripper mechanisms.
Under-Actuated Robot Gripper
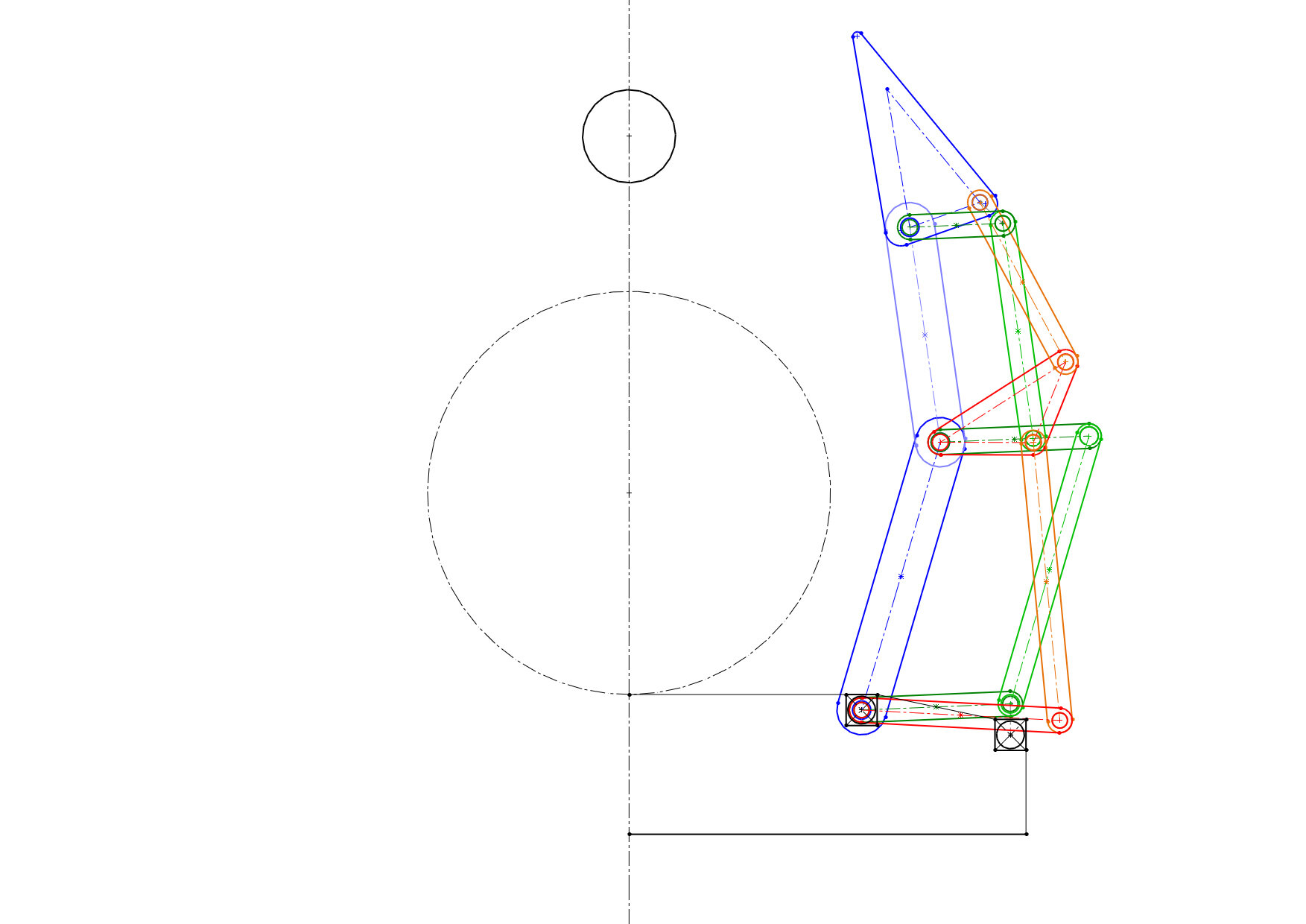
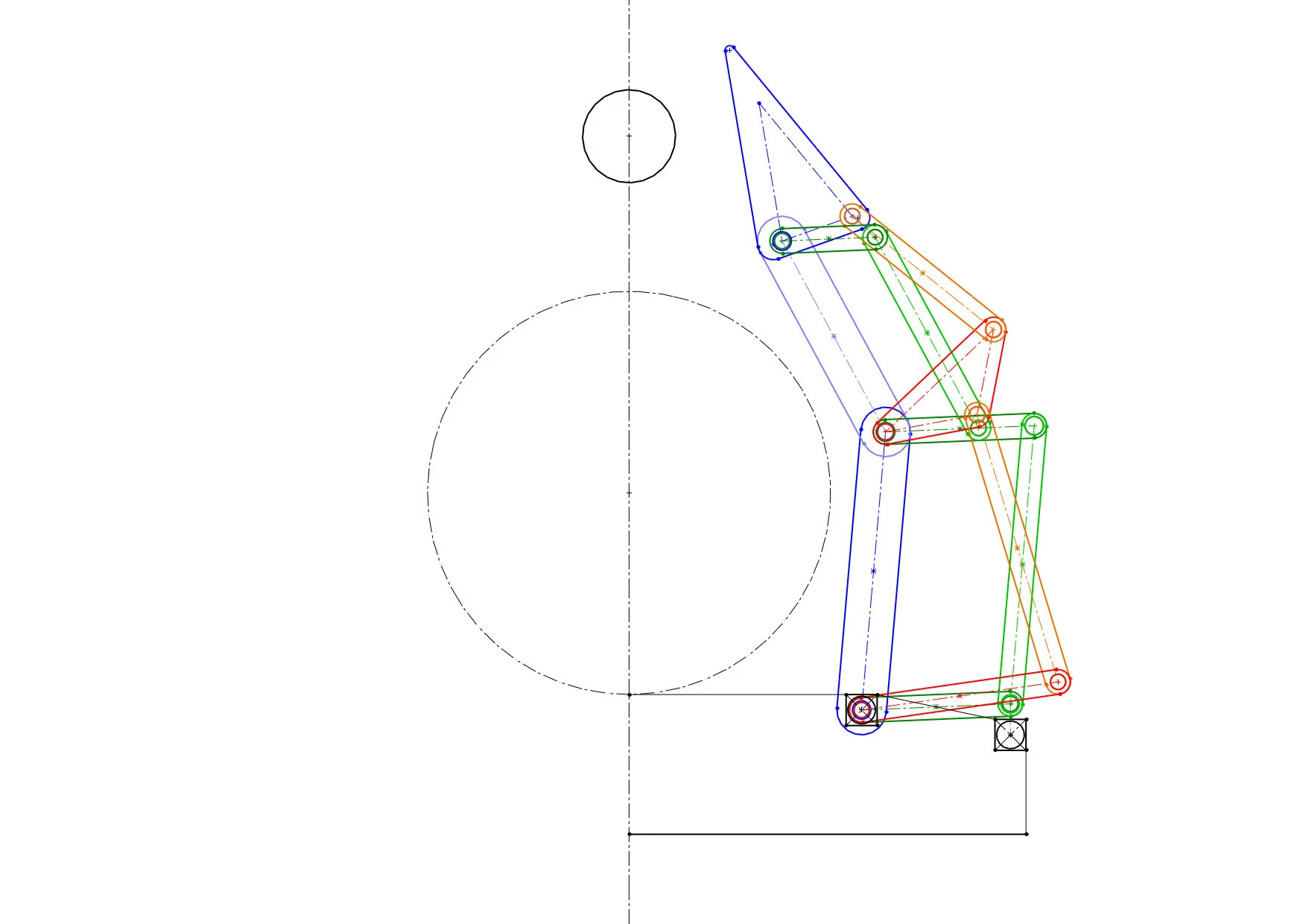
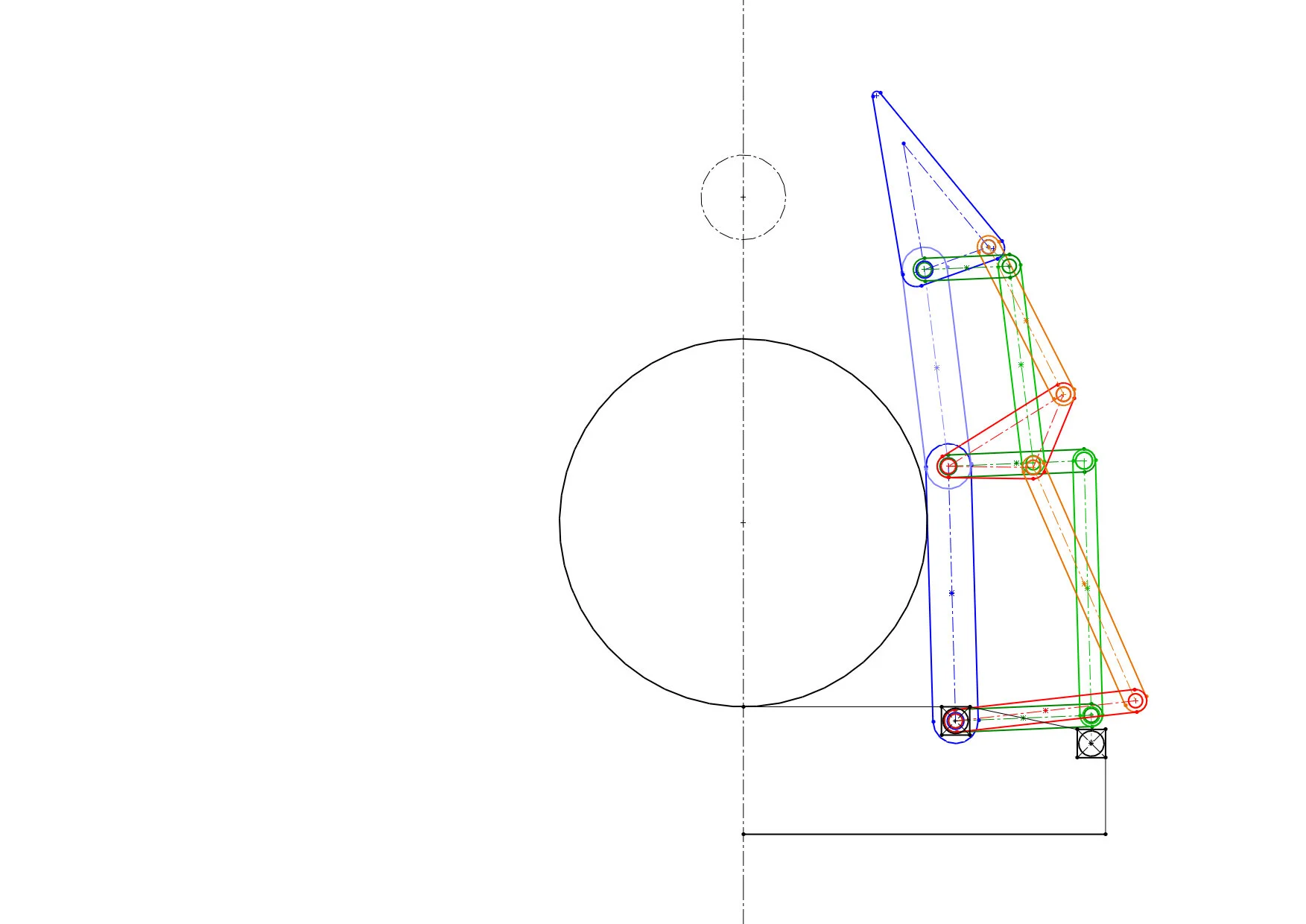
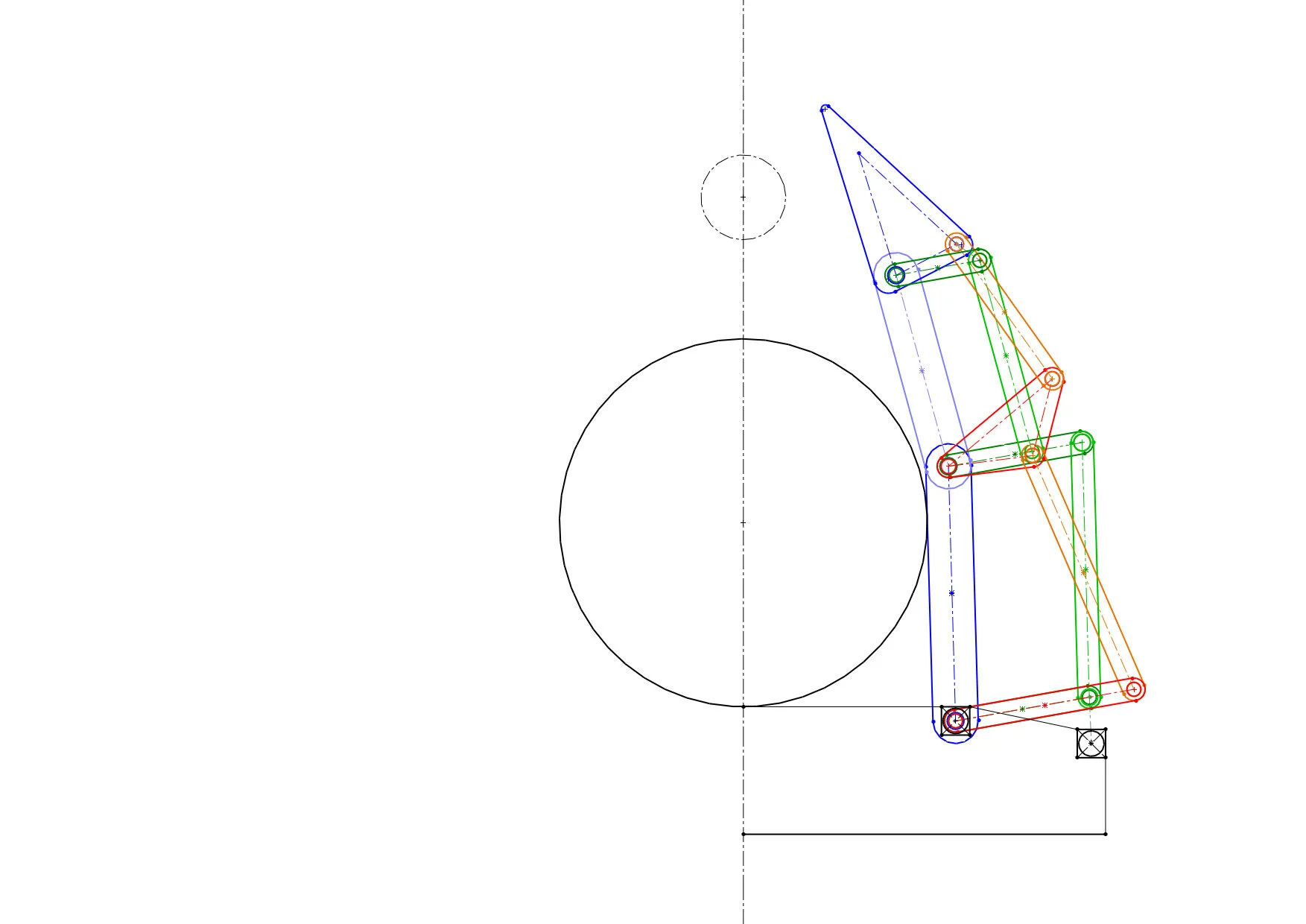
The orange linkages form the actuator input transmission line (1 actuator for this finger), and the green linkages are the spring pre-load line (springs are not shown in the animation). While a finger is closing on an object, the configuration of the finger at any time is determined by the external constraints associated with the object. For instance, a distal phalange won’t articulate until the object stops the articulation of the proximal phalange and causes actuator input to overcome the spring pre-load that holds the distal phalange straight. When the object is fully grasped, the force applied by actuator is distributed among the phalanges.
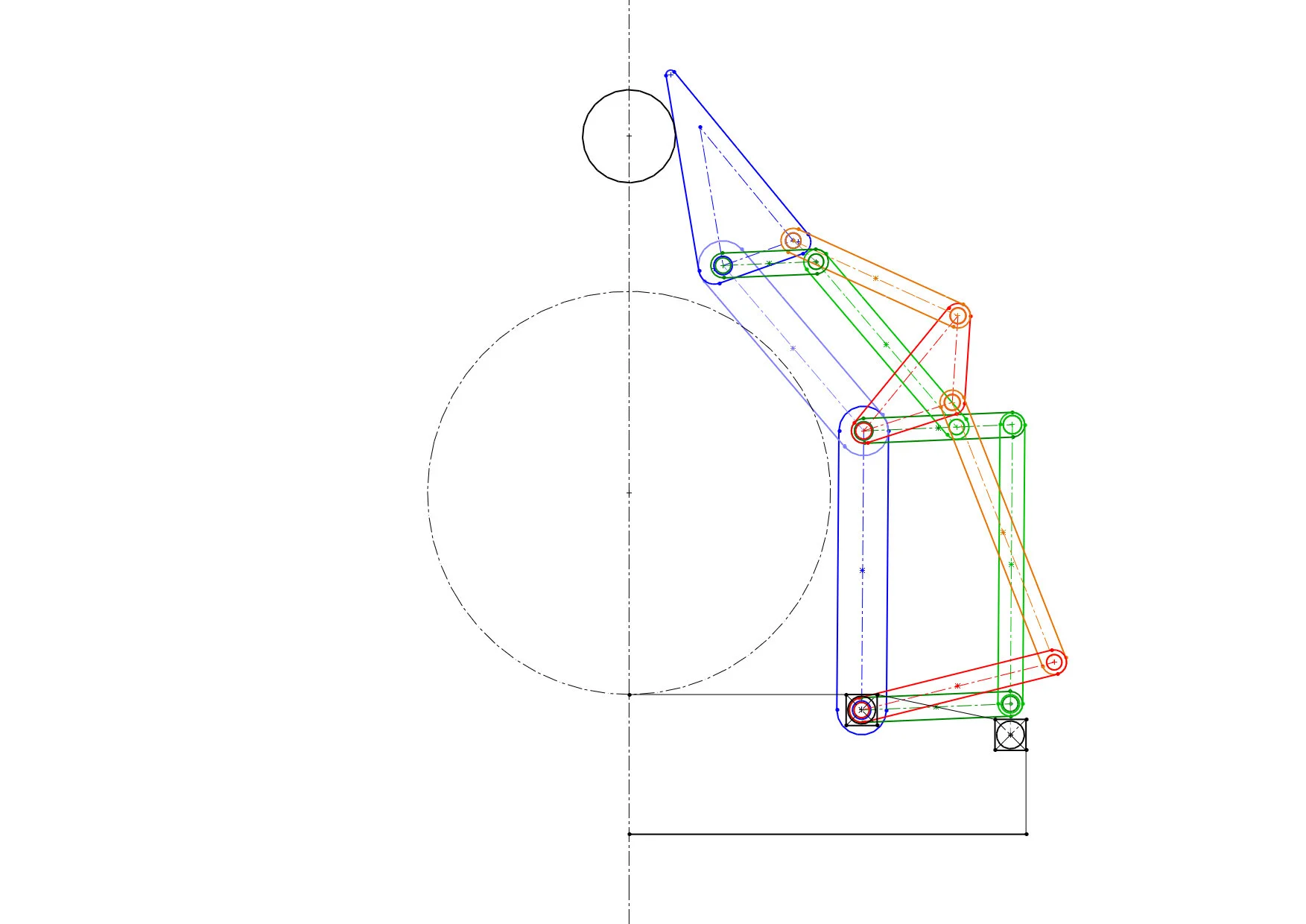
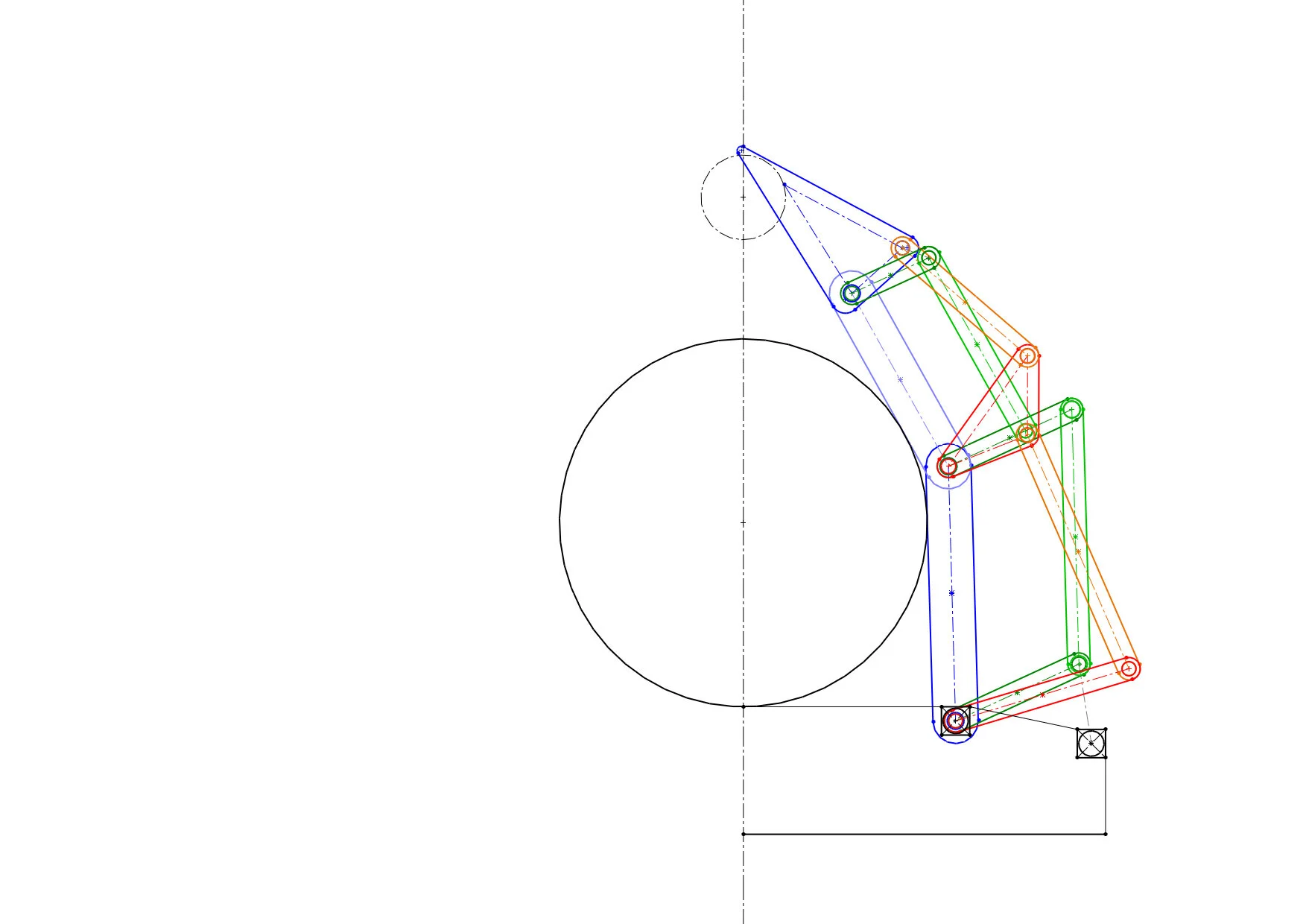
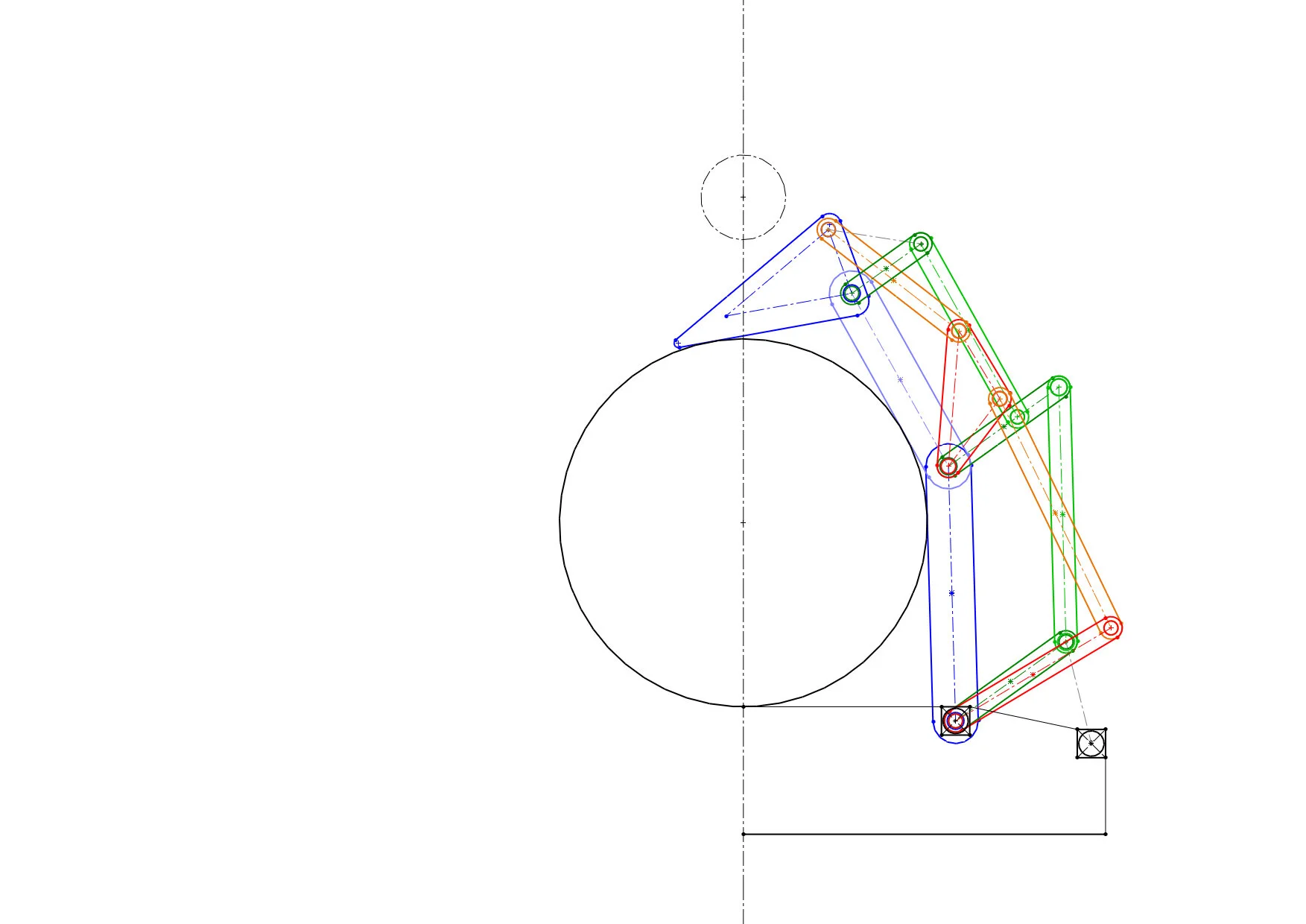
Power Grasp
Power grasps are associated with large grasping forces and with contact zones which are located along the phalanges and the palm, thereby enveloping the object. In this particular grasping scenario, the forces are approximately directed towards the circle’s centre, which indicates stable holding. Note that the grey dashed lines connected to the green linkages represent tensile springs that provide pre-load forces to the phalanges.

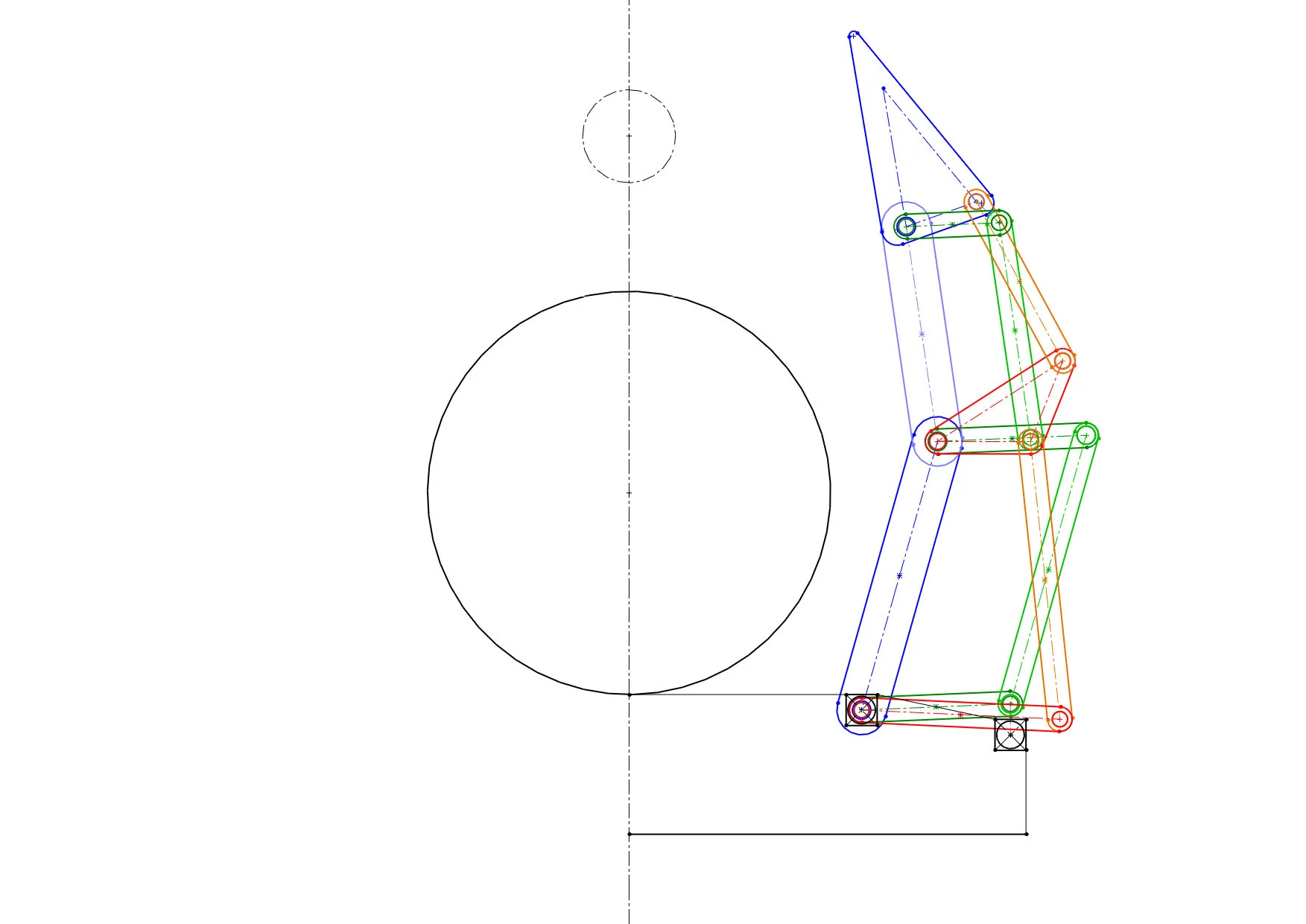
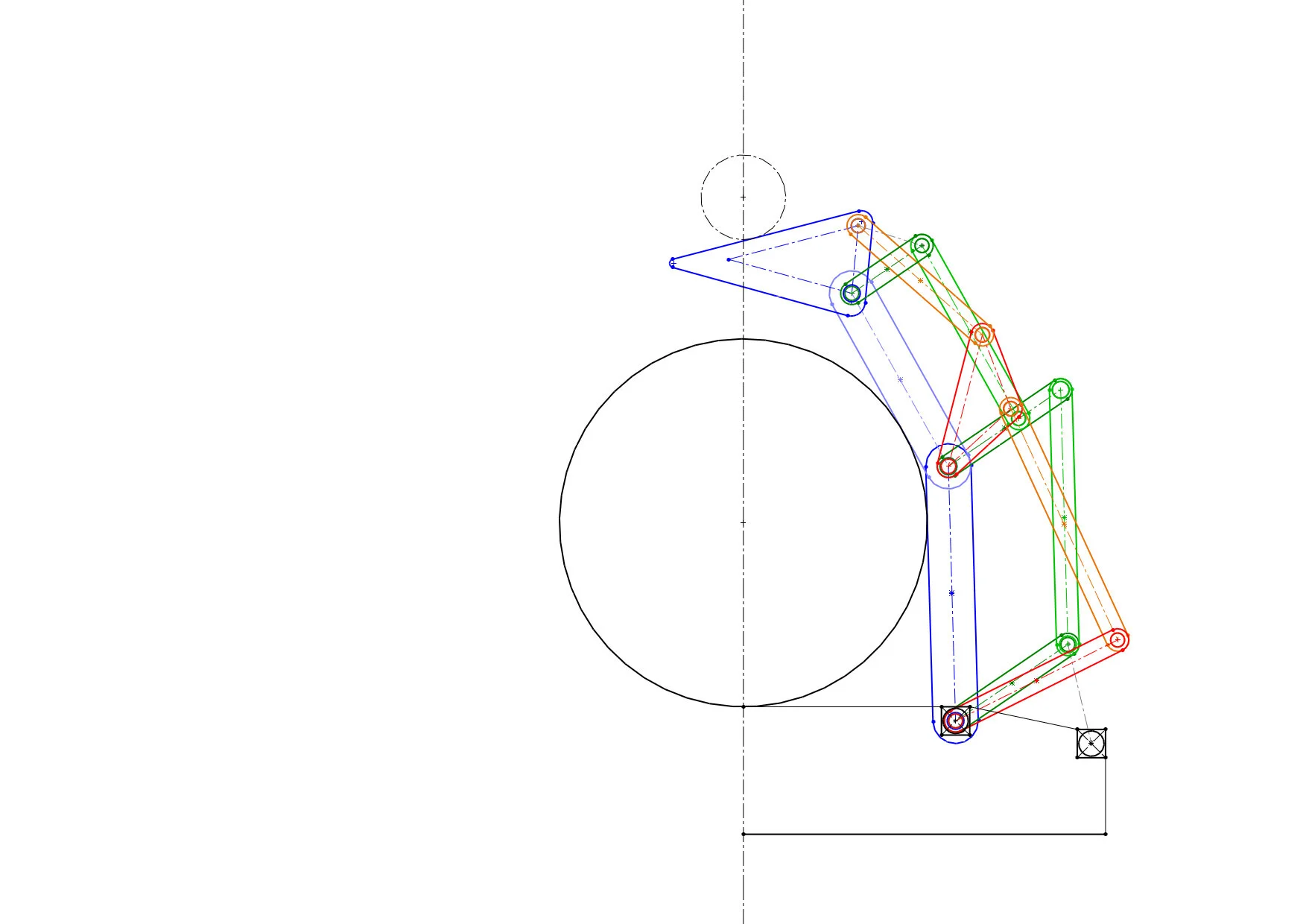
Precision Grasp
Precision grasps are generally associated with small grasping forces and with contacts at the fingertips. This mode is used in precise manipulation tasks such as turning a key.