Surgeons who perform orthopaedic surgery routinely need to measure the depth of holes drilled in bone, and accurate depth measurement is necessary to select the appropriate screw to use in osteosynthesis surgery. The current methodology uses an instrument called the ‘depth gauge’, which consists of a hooked wire and a sliding component marked with graduations. Evidence shows that the current method results in placing screws of incorrect length 9% of the time in fixation of distal radius fractures. Incorrect screw length has significant clinical consequences such as rupture of adjacent tendons. Interviews with practicing surgeons have also shown that the instrument is frustrating and time consuming to use. Daniel Demsey and Juan Pablo Gomez Arrunategui (Surgical Technologies Laboratory) thus seek to solve the problem by developing laser displacement sensors mounted on a surgical drill to determine drilled bore depth. The solution requires minimal change from existing surgical practice and uses existing surgical equipment. I involved in the later stage of the project and provided insights regarding the fixation method, component placement, and ergonomics of the user interface. I also created CAD models of the prototype for presentation and patent application purpose. The team successfully demonstrated that laser triangulation with a paired distance sensors mounted on a surgical drill is more reliable than the conventional depth gauge in the laboratory setting.
Laser Surgical Drill Depth Guide
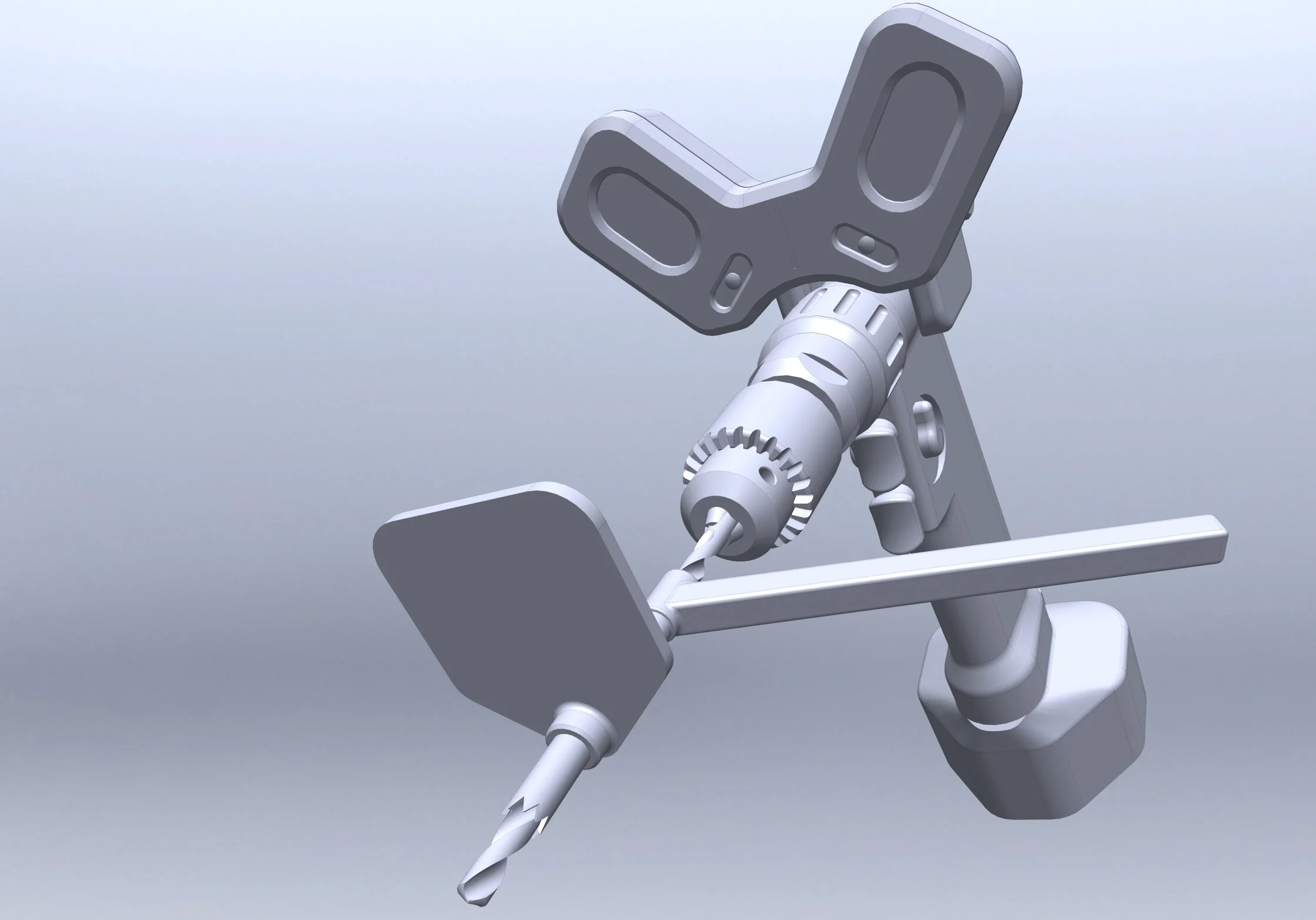
The prototype consisted of 2 laser displacement sensors sending displacement and time data to a microprocessor.

Double Distance Sensors Arrangement
The prototype was designed to be secured on a ConMed MPower2 medium size pistol type surgical drill using simple and quick clamping method. It is equipped with double displacement sensors with their beams tilted toward the drilling axis.
The internal electrical components of the device must be encased in a housing that can be sterilized for use in the operating room. The housing thus must be water and vapour-proof, both for the sterilization process and for the surgical environment, where the device will be exposed to blood and aqueous fluids. However, since this requirement was not the top priority for the concept-validation prototype, it was planned as a part of future development.
A drill guide could be added to the system to constrain the drill bit orientation so that tilt or movement of the drill perpendicular to the drilling axis would not be possible. Moreover, adding a planar feature with uniform surface to the drill guide further improves the performance of the prototype.
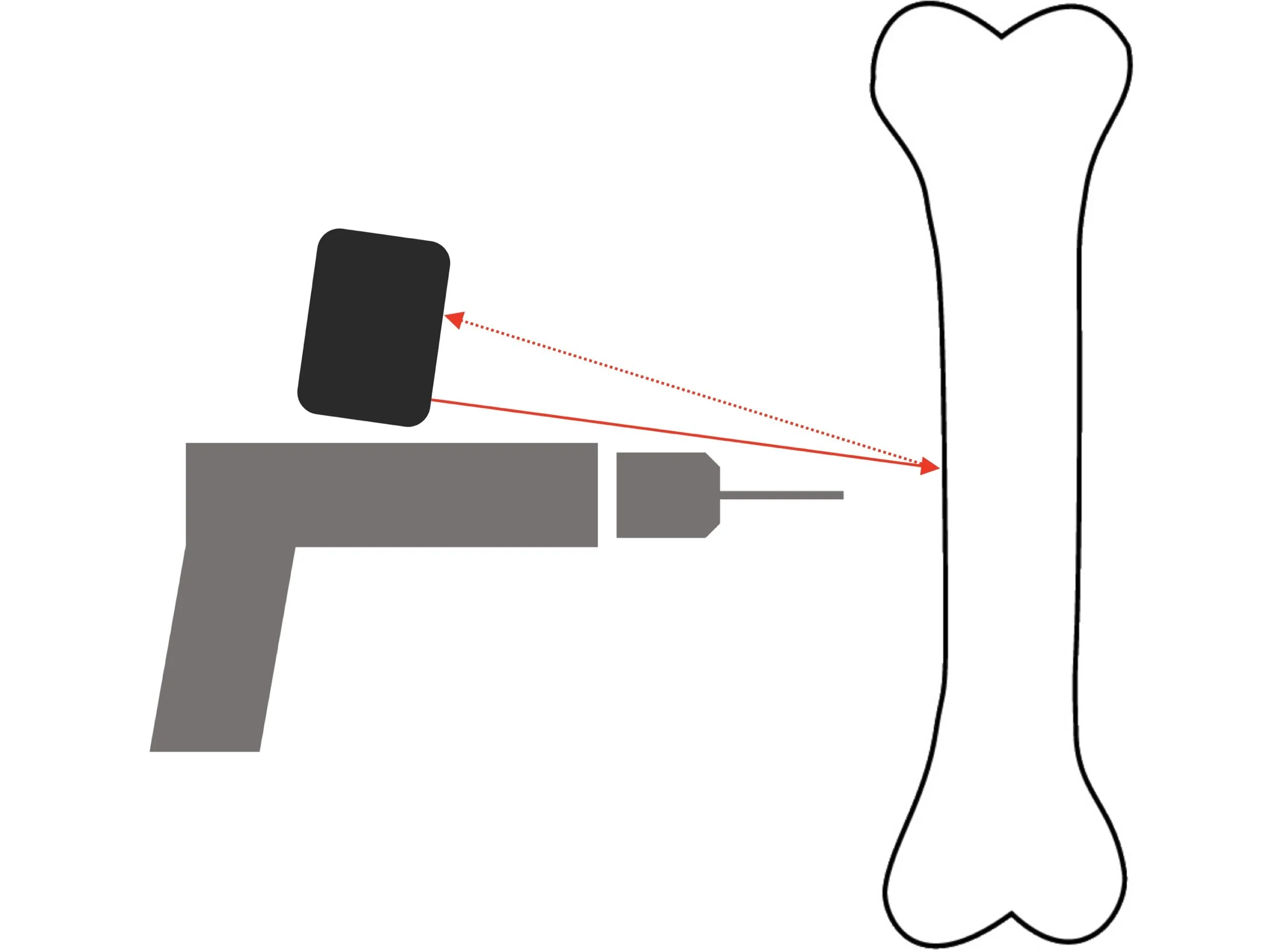
Angling the beams towards the drilling axis limits the effect of rotation or tilt of the drill on the displacement measures. It also places the measurement point closer to bone surface rather than adjacent soft tissue.

Double displacement sensors arranged on two opposite sides of the drilling axis address the sensitivities to tilt that is found in the single sensor version.

Adding a drill guide with a planar surface could prevent errors due to rotational vibration of the drill, as slight rotational movements would not cause the measurement beam to fall out of the planar surface.

User Interface and End Depth
As drilling commence, the prototype device shows real-time computed bore depth to the surgeon on screen.
After data filtering with a second order Butterworth filter velocity and acceleration were calculated using differentiation and double differentiation. Characteristic spikes in velocity and acceleration indicated cortical breach and allowed identification of final bore depth.
In real clinical use, the system would have to be activated in some way to begin measuring displacement, either through a controller or by some passive detection system.